ML Q&A
本文整理 Machine Leanring 一些相关问题。
目录
线性模型
线性回归为什么使用均方差作为损失函数?
使用均方差损失函数,实质上是最小二乘法的思想,使用平方来度量观测距离,最优拟合直线使各点到直线的距离之和(平方和)最小。 在误差\(\varepsilon\)服从高斯分布的前提下,使用极大似然估计法可以得到最小二乘式子,其形式与均方差相同。
假设误差服从高斯分布:
似然函数:
对数似然:
求偏导,最大化对数似然:
可以看到求极大似然估计法令\(u,\sigma^2\)偏导为 0,最终的形式与最小化均方差的形式是相同的。
线性回归、Ringe、LASSO 的关系?
在误差服从高斯分布的前提下,均方差损失函数->最小二乘->极大似然估计(最大后验概率)
更进一步,在误差服从高斯分布的前提下:
- 如果参数\(w\)服从高斯分布,则通过最大后验推导出来最后即为 Ringe 回归(加上 L2 正则项的线性回归)
- 如果参数\(w\)服从拉普拉斯分布,则最后推导出来即 LASSO(加上 L1 正则项的线性回归)
详细推导参考:这里
Linear SVM 和 Logistic Regression 的比较?
相同:
- 都是线性分类器,本质上都是求解一个超平面。很多情况下两者的性能接近。
- 分别采用 logistic loss 和 hinge loss,本质上都是增加对分类结果影响较大的样本的权重,减小对分类影响较小的样本的权重。
不同:
- LR 改变权重的方式是通过 sigmoid 映射,减小离分类平面较远的数据的权重,增加离分类平面较近的数据权重;而 SVM 则是直接考虑 support vector,即与分类最相关的数据点取学习分类器。
- SVM 最后的分类超平面是有几个支持向量决定的,对于一个训练好的 SVM 分类模型,增加或删除支持向量 gap 之间的数据点对分类结果是没有影响的;而对于 LR,每个数据点对最后的模型都是有影响的 (具体的影响随数据点到平面距离的增加而递减)
- Linear SVM 和 LR 在低维小数据量上表现差不多,但是在高维数据上 LR 表现更好。(因为 Linear SVM 依赖于数据表达的距离测量,在高维下这个刻度可能不好,一般需要做 normalization)
- SVM 转化为对偶问题后,分类只需要计算与少数几个支持向量的距离,这个在进行复杂核函数计算时速度更快;
NOTE:
- 感知机模型也是划分一个超平面,不同的是感知机是通过最小化误分类点到超平面的距离之和,而 LR 是将分离超平面作为 sigmoid 的输入,输出正负样本的概率,通过极大似然估计最大化后验概率分布,SVM 则是通过最大化样本到超平面的最小距离确定超平面
- 两者都可以通过 kernel trick 解决数据非线性可分的问题
集成方法
Boosting 和 Bagging 比较?
-
Bagging 的弱学习器之间不存在依赖关系(易并行),Boosting 的弱学习器之间存在依赖关系(较难并行)
-
Bagging 偏向于减少方差 variance,Boosting 偏向于减少偏差 Bias。对于 Bagging 而言,我们希望单个弱学习器关注减少 Bais(因此采用比较深的决策树),但是弱学习器之间差异性比较大(随机属性选择),通过集成以降低模型的 variance;对于 Boosting,每次个弱学习器都会在上一轮的基础上进行拟合,可以保证模型的 Bias,因此对于单个弱学习器而言,我们选择比较简单的分类器(深度很浅的决策树)以保证 variance 比较小。
-
Intuitively, Bagging 是每个人都专精一个领域,不同的人攻克不同的领域,最后组合起来。Boosting 是每个人可以不那么精通,但是每个人的领域要尽量一致,一起做一件事情。
Bagging 中为什么常使用决策树作为 weak learner?
- 通常希望 基学习器具有低偏差、高方差的性质(overfitting 趋势),经过 Bagging 后能够在增加一点偏差的同时大大减少方差。
- 未剪枝的决策树具有这种性质,线性学习器一般属于较稳定的学习器(不容易 overfitting)
- 数据样本的扰动对决策树的影响较大,因此不同子样本集训练的决策树随机性较大(不稳定学习器)
Random Forest 和 GBDT 的比较?
相同:
- 两者都是使用决策树作为基本的弱学习器
不同:
- RF 是 bagging 的思想,弱学习器之间不存在依赖关系;GBDT 是 boosting 的思想,当前的学习器依赖于之前的学习器
GBDT 和 XGBoost 的比较?
- 前者更多是指一种机器学习算法,后者是该算法的工程实现
- GBDT 以 CART 作为弱分类器,XGBoost 不仅可以使用树作为弱分类器,还支持线性分类器
- GBDT 在优化时候只使用了一阶导数信息,XGBoost 在优化时进行了二阶泰勒展开, 同时使用了一阶和二阶导数信息
- XGBoost 支持自定义损失函数(只要损失函数一阶二阶可导)
- XGBoost 在损失函数中显式地加入了正则项(叶子节点的个数、每个叶子节点输出的 score 的 L2 模平方),控制模型复杂度,防止过拟合。本质上相当于对树进行剪枝,但与 GBDT 构建完决策树再回头剪枝不同,XGBoost 在分裂的过程中就考虑的正则化
- XGBoost 借鉴了随机森林,构建每棵树的时候支持列抽样(columns subsampling)
- XGBoost 进行了并行优化。这个并行不是在树粒度上的并行,树还是串行生成的,并行是在特征粒度上的并行。预先对特征进行排序,保存为 block 结构,后面可以重复使用(并行计算特征的信息增益),大大提升了计算的速度
- XGBoost 使用(可并行的)近似特征划分法对特征进行划分,GBDT 使用传统贪心算法
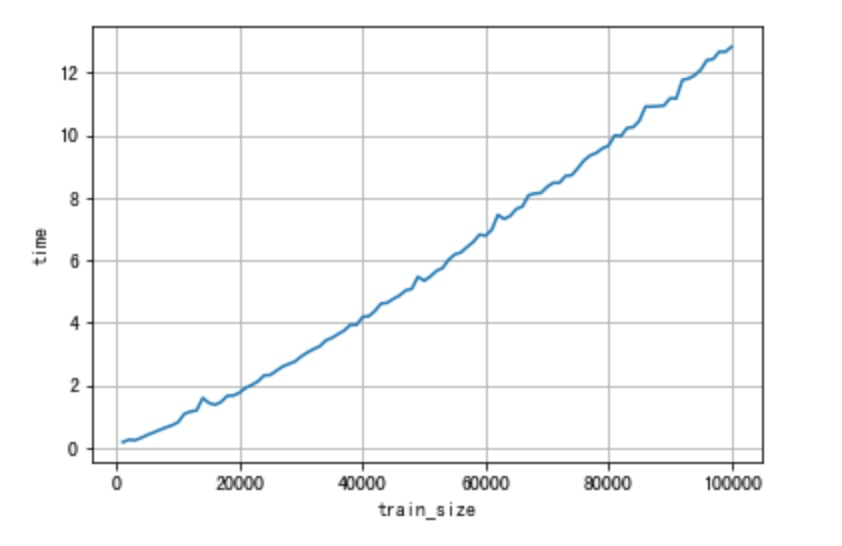
当样本数量、特征数量、树的棵数增加,GBDT 训练时长分别是线性增加的吗?
- 当样本数量增加:不是,假设树的棵数不变,对于单棵决策树来说,样本数量的增加带来的主要是来源于特征排序时间的增加,排序的复杂度不是线性的,而是接近 O(Nlog(N))
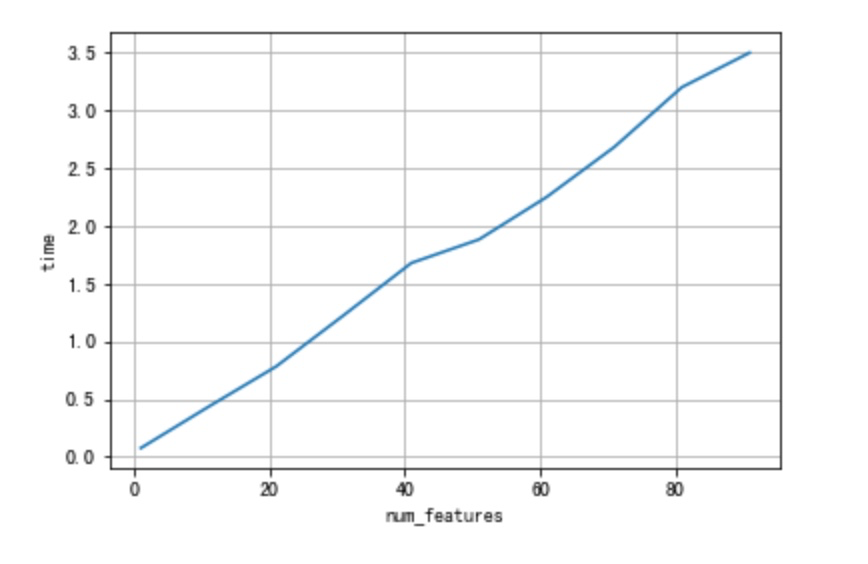
- 当特征数量增加:不考虑特征之间的性质差异,是的。特征数目的增加带来的训练时间的增加是线性的。
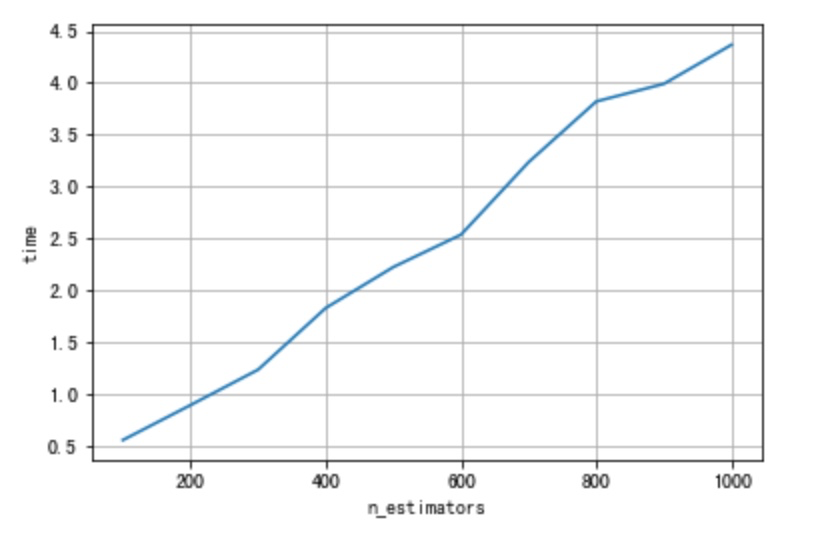
- 当树的棵数增加:不考虑树的增加对模型收敛性的影响,是的。树的增加带来训练时间的增加是线性的。
- 当树的最大深度增加:不是,树的最大深度线性增加带来的训练时间的增长是指数关系的。
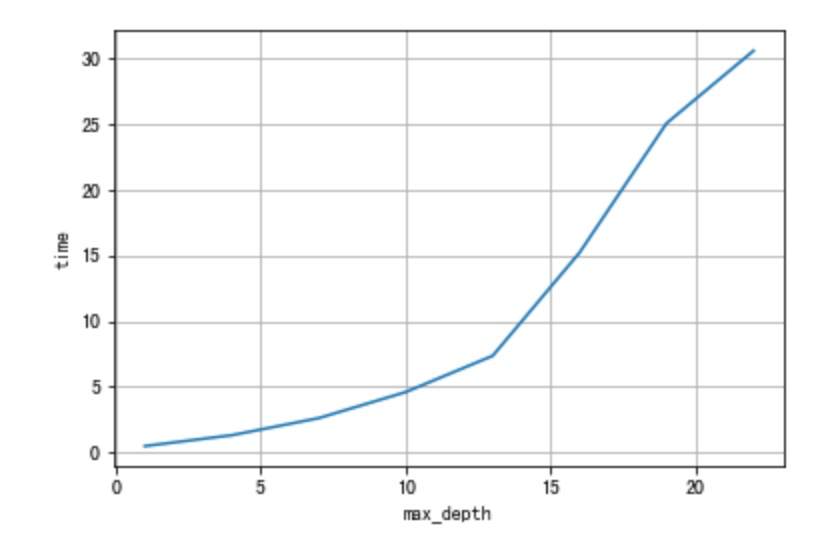
详细代码见 这里
GBDT 中哪部分可以并行?
- 计算每个样本损失函数的负梯度
- 对特征进行排序、寻找最佳分裂点
- 更新每样的负梯度
- inference 时样本在所有树上的结果累加
杂七杂八
贝叶斯观点和频率观点有什么不同?
频率观点试图从「事件」出发,为事件本身建模,事件在独立重复事件中频率趋向于 p,则 p 就是事件的概率。
贝叶斯观点相反是从「观察者」角度出发,认为观察者知识不完备。在贝叶斯框架下,同一件事情,对于知情者而言是确定事件,对于不知情者是随机事件。即随机性并不是由事件本身决定,而是由观察者的知识状态决定。
贝叶斯推断试图描述观察者知识状态在新的观测后如何更新。假设观察者对某件事处于某种知识状态中(前置信念 prior belief),之后观察者开始新的观测,获得一些新的观测结果(evidence),通过满足一定条件的推断得出该陈述的合理性(likelihood),从而得出后置信念(posterior belief)来表征观测后的知识状态。
生成模型和判定模型的区别?
给定数据\(X\),求解\(Y\) (类别或者连续值),我们感兴趣的是条件概率\(P(Y|X)\),有两种方法得到\(P(Y|X)\):
-
生成方法 generative method 生成方法对联合概率\(P(X,Y)\)进行建模。常见的生成方法有朴素贝叶斯,混合高斯模型等。使用生成方法的模型称为生成模型。 以朴素贝叶斯为例子,从样本中可以求得\(P(Y),P(X|Y)\),进而得到联合分布\(P(X,Y)\),再根据\(P(Y|X)=P(X,Y)P(Y)\)得到最终想要的\(P(Y|X)\)。
-
判别方法 discriminative method 相比生成方法对\(P(X,Y)\)进行建模,判别方法直接对\(P(Y|X)\)进行建模。常见的判定模型有 LR、SVM、决策树等。 以 LR 为例子,LR 本质上是把\(P(Y|X)\)建模为:
生成模型其实包含了判别模型,因为我们总能由联合概率分布\(P(X,Y)\)得到\(P(Y|X)\),这从侧面表明训练生成模型可能更加 expensive。 另外我们可以通过生成模型合成数据,但是没办法通过判别模型合成数据。
总结:生成模型对联合概率进行建模,而判别模型直接对条件概率进行建模。
L1 正则化为什么能让特征稀疏?
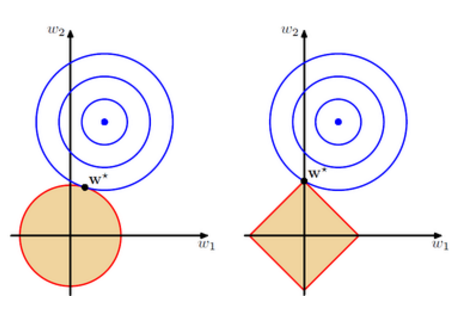
假设只有两个特征\(w_1, w_2\),在损失函数中加入正则项相当于给解空间限制了条件。在下图中我们用橘色区域表示正则项的限制,蓝色等高线表示原损失函数对应的解。对于 L1,限定条件为:
这个区域画出来如右下图橘色区域,蓝色点表示没有正则下的最优解,蓝圈表示次优解,我们需要寻找圈圈与橘黄色区域的交点。从图中可以看出,L1 正则化很大几率会与四个顶点相交(w1 或 w2 变为 0)。而对于 L2,限定条件为:
画出来如左下图橘色区域。除非最优解刚好处于坐标轴上,否则得到的解只会使参数变小,不会变为 0。
DNN 的特点?
主要有三点:
- 逐层堆叠的方式非常有利于表征学习(提取高级特征)。这个也是深度网络总体上比扁平网络效果好的原因。
- 特征的内部变换。这个是决策树以及基于决策树的 Boosting、Bagging 模型不具备的,他们始终是基于原始的特征空间,没有进行自动化的特征变换。
- 具备足够的模型复杂度,可以拟合复杂的非线性关系。